
卫星姿控系统半物理仿真中转台控制算法的实现
发布时间:2024-04-02 07:36:51 来源:江南体育官方网站:卫星控制管理系统半物理仿真是在实验室中模拟卫星在轨运动特性的试验方法,大多数都用在验证卫星控制管理系统方案和性能指标,是卫星控制管理系统研制中的一个重要环节。在卫星控制管理系统半物理仿真中三轴转台是一种重要的运动仿真器,针对以往转台控制算法复杂,软件难实现运行时间长等问题,提出了一种简单有效的三轴转台模拟卫星姿态运动控制算法,并给出具体的软件实现过程,对于转台在仿真中的应用具有极大的借鉴和指导意义。
摘要:卫星控制管理系统半物理仿真是在实验室中模拟卫星在轨运动特性的试验方法,大多数都用在验证卫星控制管理系统方案和性能指标,是卫星控制管理系统研制中的一个重要环节。在卫星控制管理系统半物理仿真中三轴转台是一种重要的运动仿真器,针对以往转台控制算法复杂,软件难实现运行时间长等问题,提出了一种简单有效的三轴转台模拟卫星姿态运动控制算法,并给出具体的软件实现过程,对于转台在仿真中的应用具有极大的借鉴和指导意义。
卫星控制管理系统半物理仿真试验其实就是卫星动力学和运动学的仿真,由于要求硬件接入回路,它通常用于验证卫星控制管理系统方案和性能指标,包括动力学仿真和运动学仿真。仿真计算机计算卫星的动力学和运动学方程,转台模拟卫星在空间的运动,目标模拟器模拟卫星姿态敏感期的参考目标的环境特性。本文主要研究转台系统接入仿真试验过程中存在的问题:针对转台控制算法复杂,地速影响这两个主体问题,本文给出了具体的转台控制算法,软件实现简单,执行效率非常之高,同时给出了地速补偿方案及具体实现方式。本文所介绍的控制算法已成功应用于某卫星型号半物理仿真试验中,文章的最后给出了试验结果。
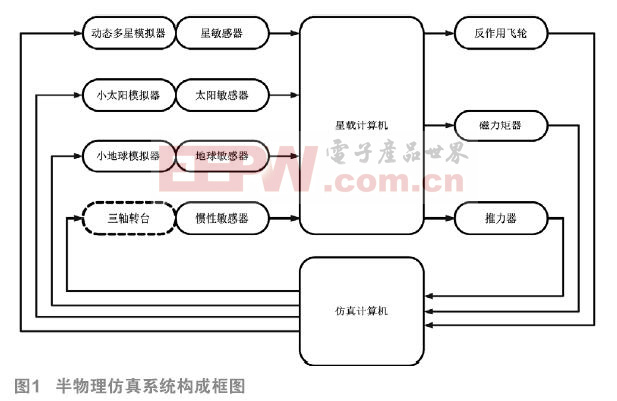
卫星控制管理系统半物理仿真比数学仿真具有更高的置信度,是卫星控制管理系统研制中的一个重要环节。当控制管理系统研制出来以后,人们最关心的问题是它的功能和性能是否与设计的基本要求相一致,这只有通过对实际系统来进行试验才能确定。但是人造卫星控制管理系统不同于一般的地面设备,它必须在特定条件下才能实现闭路运行,并显示其性能指标。半物理仿真是将参试的卫星控制管理系统各部件(包括硬件和软件)接入仿真回路所进行的闭路动态试验,它在地面设备(运动仿真器、目标仿真器、仿真计算机等)的配合下,模拟卫星在轨道上的各种运作时的状态,达到验证所设计的控制管理系统方案,检验系统实际性能的目的[1]。卫星控制管理系统半物理仿线所示。

运动仿真器的基本功能是提供一种与卫星在轨道运行时相似或等价的运动,使卫星反馈控制试验形成回路。
三轴伺服转台其实就是一个高性能的三轴伺服系统。在运行时,它要求每个轴严格地跟随仿真计算机的某项输出。一个三轴转台运动的效果是使在其内轴试验台上的仪器作绕转台转动中心的姿态运动,转台的动态环节其实就是串接在整个试验回路中的一个附加环节,理想情况下它的传递函数最好等于1,精度由转台机械台体和控制管理系统(测角装置、电路及控制计算机、马达等)来保证。因此,它是一个名副其实的运动模拟器,不仅用于卫星姿态控制系统的半物理仿真,也大范围的使用在其他运动物体的控制仿真(如飞机、导弹、鱼类等)和某些专用仪器的性能测试(如陀螺)。某UUT转台实物如图2所示。
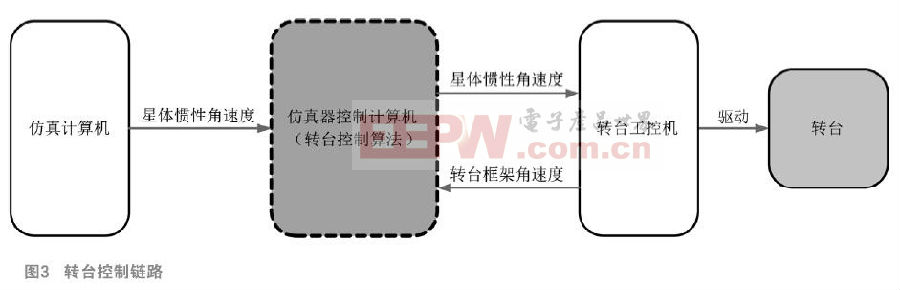
在卫星控制管理系统半物理仿真中,转台的控制链路如图2所示。动力学仿真计算机将计算得到的星体惯性角速度(在星体系下的表示,本文所述物理量参考坐标系均为星体坐标系)利用互联网(或串口、反射内存等)发送给仿真器控制计算机,仿真器控制计算机从转台工控机获取转台当前框架角信息,将星体惯性角速度转换为转台框架角速度,并利用互联网(或串口、反射内存等)发送至转台工控机驱动转台框架转动。
由转台控制链路可知,仿真器控制计算机内将星体惯性角速度转换为转台框架角速度算法为转台应用的核心,也是转台应用的重点和难点,本文详细的介绍了一种实现简单完成效率极高的控制算法及其详细推导过程,易于工程实现。

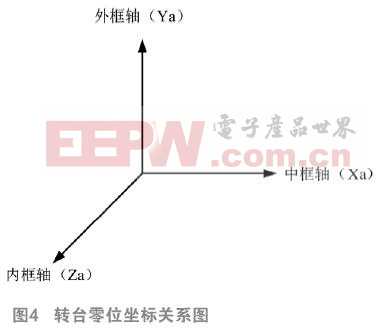
分别为转台的内、中、外框架角,从转台工控机获取,转台零位时,即内、中、外框轴正交,构成右手坐标系时,内、中、外框轴分别对应于星体坐标系的偏航轴Za、滚动轴Xa、俯仰轴Ya,定义该坐标为星体坐标系,该坐标系与转台固连。
陀螺在转台上的安装方向参考陀螺坐标系与星体坐标间关系确定,转台控制的最终目的是使转台框架角速度在星体坐标系下的投影值与惯性角速度一致。
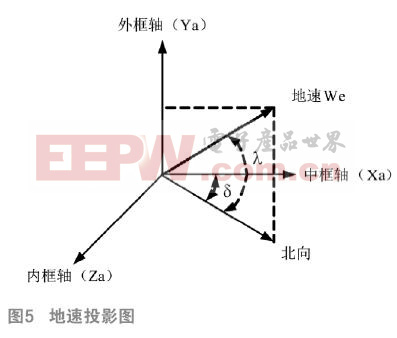
由于仿真试验在地面进行,陀螺输出还包括了地球自转的速度,这一附加输出是卫星在轨运行时所没有的,仿真试验中应予以扣除。
首先将地速投影至转台零位坐标系,然后再投影到转动坐标系(即星体系),设地速为we,λ为转台所在地的地理纬度,δ为北向逆时针转到转台零位时Xa轴(中框轴)的角度,得到地速在星体坐标系下的表示如下:

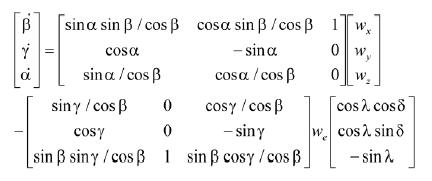
经整理得到转台框架角速度如下,将此公式代入转台控制算法中,就可以完成对于地速的补偿:

(1)转台控制算法:转台控制算法不同于常规的实现方式,该方法不存在矩阵求逆等复杂的矩阵运算、编写软件较容易实现、软件运行时间短,从而极大地提高了仿线)
算法:地球自转对陀螺的影响与仿真试验室在地球上所处的纬度和安装陀螺的运动模拟器所处的方位有关。地球自转角速度比卫星的姿态稳定度大的多,在仿真试验中,它将投影到每个陀螺的输入轴上,成为一种附加干扰,必须加以补偿,本文所介绍的地速补偿方法,扣除地速影响后,大幅度的提升了转台模拟卫星运动的准确度,能够适用于高稳定度卫星的姿态运动仿真要求。
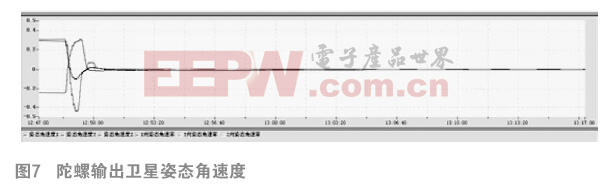
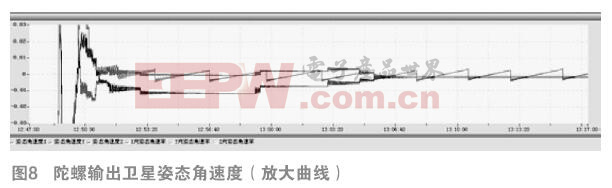
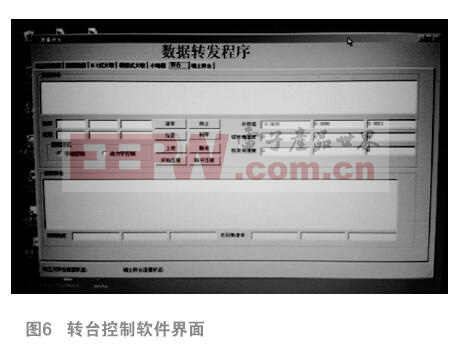
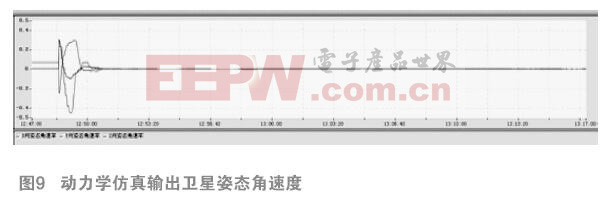
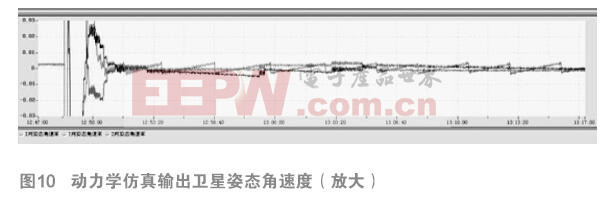
本文介绍的控制算法,已应用于上海航天控制技术研究所某卫星型号半物理仿真试验,转台控制系统软件界面如图6所示,陀螺输出卫星姿态角速度,动力学仿真输出卫星姿态角速度等试验曲线所示。可见,陀螺测量得到卫星姿态角速度与动力学仿真输出一致,说明应用该控制算法,转台系统能够精准模拟卫星的姿态运动。
本文详细的介绍了转台在卫星控制管理系统半物理仿真中应用的具体实现方法,该方法具有软件易实现、不存在矩阵求逆等矩阵运算、节省软件运行时间、提高控制实时性的优点。另外,扣除地速影响后,大幅度的提升了转台模拟卫星运动的准确度,能够适用于高稳定度卫星的姿态运动仿真。目前该方法已经在多个卫星型号的半物理仿真中得到成功应用,对于其它环境下的半物理仿真应用也具有极大的借鉴意义。
[1]刘良栋,刘慎钊,孙承启.卫星控制管理系统仿真技术[M].宇航出版社,2013.12
[2]章仁为.卫星姿态动力学与控制[M].北京航空航天大学出版社,1998
[3]刘慎钊.卫星控制管理系统仿真[M].系统仿线]刘慎钊.卫星控制管理系统多转台多模拟器半物理仿真方法[M].航天控制,2004.8

 京公网安备 京ICP备05031284号-1
京公网安备 京ICP备05031284号-1